1. Solid Edge FloEFD ja arvutuslik voolu dünaamika
6. Võrgustiku loomine ja keha jaotamine kontrollmahtudeks
6.1. Võrgustik FloEFD-s
Numbrilise lahenduse eelduseks on geomeetria jaotamine väikesteks osadeks ehk lahtriteks, kus lahendatakse Navier–Stokesi võrrandid. FloEFD kasutab lõplike mahuelementide meetodit (LMM), mis tähendab, et iga lahtri kohta arvutatakse valitsevad võrrandid integraalkujul. Lahtrite massikeskmetes paiknevad põhimuutujad: rõhk, temperatuur, kiiruskomponendid ja turbulentsiparameetrid. Lahtri pindadel aga arvutatakse voolude ja soojusvoogude integraalsed väärtused.
FloEFD rakendab kartesiaanvõrku, mis koosneb risttahukakujulistest lahtritest. Kartesiaanvõrk on valitud selle lihtsuse, kiiruse ja stabiilsuse tõttu. See vähendab arvutusvigu ja võimaldab regulaarset täpsustamist. Võrgustiku täpsustamine toimub oktaarse jaotuse abil, kus iga lahter jagatakse vajadusel kaheks, neljaks või enamaks osaks.
Kartesiaanvõrgu eelisteks on:
- Lihtsus ja stabiilsus - Kartesiaanvõrk on geomeetriliselt regulaarne, mis muudab algoritmid stabiilseks ja vähendab arvutusvigu. Regulaarne struktuur võimaldab täpset kontrolli lahtrite suuruse ja jaotuse üle, mis on oluline koondumise (konvergentsi) saavutamiseks.
- Väiksem arvutuslik viga - Kartesiaanvõrk minimeerib truncation error’i ehk lõikeviga, mis tekib osatuletiste diskretiseerimisel. Kuna lahtrid on ühtlased, on arvutuslik skeem lihtsam ja täpsem võrreldes ebakorrapäraste võrkudega.
- Kiirus ja efektiivsus - Kartesiaanvõrk võimaldab kiiret automaatset genereerimist ja täpsustamist. FloEFD kasutab oktaarset täpsustamist, kus iga lahter jagatakse vajadusel kaheks, neljaks või enamaks osaks. See protsess on regulaarne ja prognoositav, mis vähendab arvutusaega ja hoiab võrgustiku loogilise struktuuri.
- Lihtne täpsustamine kriitilistes piirkondades - Kartesiaanvõrk sobib hästi lahenduspõhise täpsustamise jaoks. FloEFD tuvastab voolu gradientide põhjal piirkonnad, kus on vaja tihedamat võrku, ja rakendab täpsustamist automaatselt. Kuna võrk on regulaarne, saab täpsustamist teha lokaalselt ilma kogu mudelit ümber arvutamata.
- Piirpindade käsitlus - Kuigi kartesiaanvõrk ei järgi täpselt keeruka geomeetria kontuure, kompenseerib FloEFD seda piirpindadega lahtrite tehnoloogiaga. Lahtrid, mis lõikuvad tahke keha ja voolise vahel, jagatakse osadeks, mis jälgivad geomeetria kuju. See võimaldab täpset piirikihi simulatsiooni ilma väga tiheda võrgustiku vajaduseta.
- Väiksem võrgustiku arvutuskoormus - Kartesiaanvõrk saavutab suure täpsuse väiksema lahtrite arvuga võrreldes tetraeedriliste või keha-järgivate võrkudega. See tähendab lühemat arvutusaega ja väiksemat mälukasutust, mis on oluline inseneritöö praktilises kontekstis.
Naaberlahtrite täpsustamise tase võib erineda maksimaalselt ühe astme võrra, mis tagab stabiilse ja prognoositava võrgustiku. FloEFD lubab kuni üheksa täpsustustaset, mis võimaldab väga detailset lahendust kriitilistes piirkondades.
Allpool on joonisel 1 toodud mõned näited võrgustiku täpsustamisest voolukriitilistes piirkondades ning kitsastes kanalites:
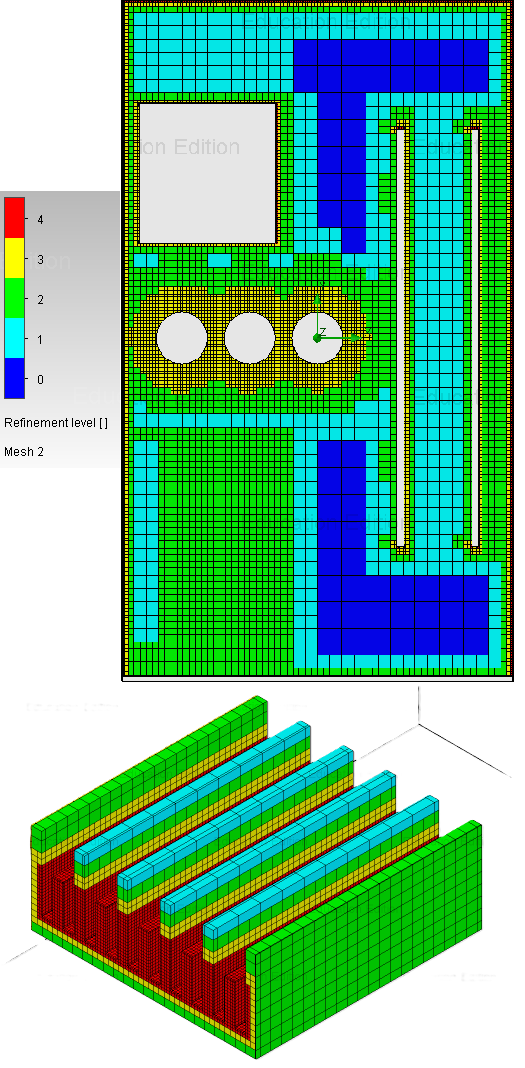
Joonis 1. Võrgustik ja selle täpsustused trükkplaadil voolukriitilistes kohtades ja radiaatori kitsastes piludes koos värviskaala legendiga.
Nagu jooniselt 1 ja 2 selgub, siis võrgustikus säilib lahtrite üldine mastaap. Täpsustamiseks on vaja vaid lahter jagada sama mastaabiga risttahukateks. joonisel 1 kasutatud värviskaalast ja joonisel 2 kujutatud võrgustikust selgub, et kõrvutiolevad lahtrid saavad erineda maksimaalselt vaid ühe taseme võrra.
Võrgustikus esineb kolme tüüpi lahtreid:
- Voolise lahtrid, mis asuvad täielikult vedeliku või gaasi piirkonnas.
- Tahke keha lahtrid, mis asuvad täielikult tahkes piirkonnas.
- Piirpindadega lahtrid, mis lõigatakse kaheks osaks – üks osa jääb voolisesse, teine tahkesse kehasse.
Need piirpindadega lahtrid on FloEFD tehnoloogia tuum, sest need võimaldavad täpselt kirjeldada voolise ja tahke keha koostoimet ilma väga tiheda võrgustiku vajaduseta. Piirpindadega lahtrites rakendatakse muudetud seinafunktsioone, mis simuleerivad piirikihi nähtusi automaatselt.
FloEFD suudab ühes lahtris käsitleda kuni 36 erinevat materjali, kuigi soovitatav on piirduda kümnega. Piirpindadega lahtrid võivad sisaldada mitu kontrollmahtu (nii tahke keha kui ka voolis ühes lahtris)– tavaliselt kuni neli, et säilitada täpsus ja arvutuskiirus. Näiteks on soovitatav, et ribide kitsas vahe sisaldaks vähemalt nelja lahtrit, millest kaks on täielikult voolises ja kaks piirpindadega. Kui tegemist on keerukama analüüsiga, ei tohiks ühe lahtris olla üle 2 kontrollmahu.
Alltoodud joonisel 2 on kujutatud pealtvaates eelnevalt kolmemõõtmelisena kujutatud kaks radiaatoriribi otsa, mille kontuure tähistab punane joon.
- Sinisega on tähistatud mõned piiripindade lahtrid.
- Halliga on tähistatud mõned voolise lahtrid
- Valgega on tähistatud mõned tahked lahtrid
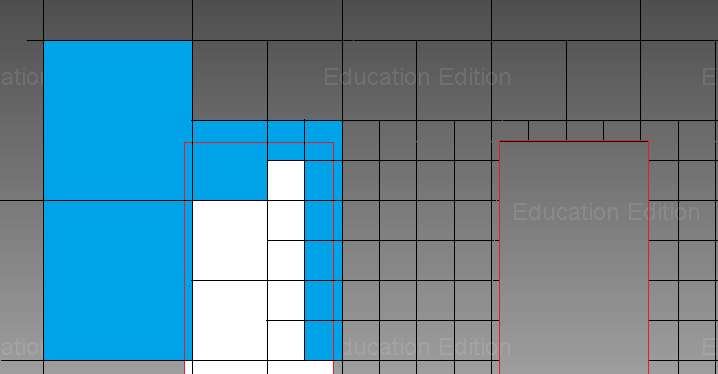
Joonis 2. Radiaatori ribide võrgustiku jaotus.
jooniselt 2 on näha, et kitsas kanal kahe ribi vahel on täpsustatud rohkem kui on miinimumnõue, sest kanali ristlõikes on voolise lahtreid 4 ja piirpinna lahtreid 2. See võib olla mõnel juhul vajalik, kuid mitte alati.
Oluline uuendus FloEFD võrgustustehnoloogias on geomeetria täpne lõikamine. Varasemates versioonides kasutati cut cell meetodit, mis lihtsustas geomeetria nurki ja võis põhjustada täpsusvigu.
Alates uuemast versioonist rakendatakse real geometry meetodit, mis arvestab mudeli tegelikke nurki ja servasid, vähendades vajadust liigse täpsustamise järele ja tagades suurema täpsuse väiksema lahtrite arvuga.